Lidar Drone Swarm Java Programming Project




Project Description
This is a swarm of drones that I helped build as a part of a small team. The drones have on board lidar and digitial and IR cameras for mapping structures of buildings for inspection purposes. The drones communicate with each other using a local wifi network to ensure no collisions and are able to combine their mappings for efficient scanning of large structures.
Project Details
- Swarm of quadcopters autonomously navigate and create lidar and camera scans of structures.
- FAST-LIO SLAM algorithm used for localization in unison with a frontier exploration scheme.
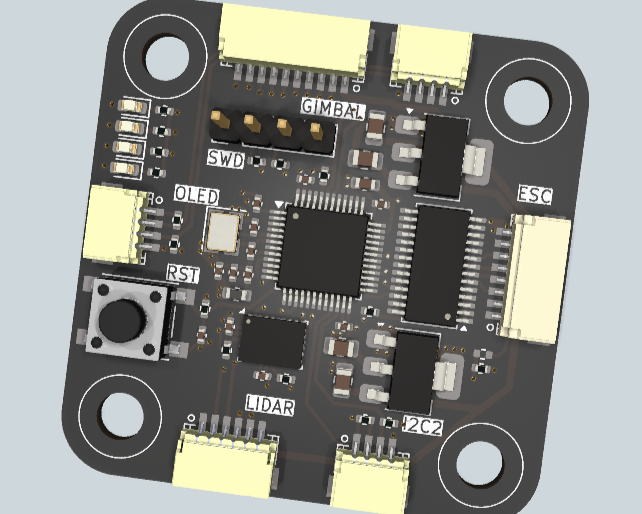
- Custom flight controller(see related project) used for flight control with RP-CM5 for compute, lidar, and camera.
- Avoids collisions using MIT's MADER to reroute trajectories if needed.
- Combines lidar point clouds and camera scans from different angles into one large scan.